Сложные переплетения: роботы учатся ориентироваться в растительности, похожей на виноградную лозу
Роботы часто используются в помещениях с очень строгим контролем, поскольку, в отличие от естественной среды, здесь нет опасностей споткнуться. Однако для выполнения важных задач, таких как мониторинг окружающей среды или поисково-спасательные работы, роботы должны уметь перемещаться по ветвям и лианам, не привязываясь.
“Когда вы выводите роботов на улицу, вся проблема взаимодействия с окружающей средой становится экспоненциально сложнее, потому что вы должны быть более обдуманными во всем, что вы делаете”, – сказал Дэвид Ологан, студент магистратуры, изучающий машиностроение. “Ваша система должна быть достаточно надежной, чтобы справиться с любыми непредвиденными обстоятельствами или препятствиями, с которыми вы можете столкнуться. Интересно заняться этой проблемой, которая еще не обязательно была решена”.
Исследовательская группа, возглавляемая Аароном Джонсоном, адъюнкт-профессором машиностроения, использовала четвероногого робота для разработки стратегии реактивной ходьбы. Альтернативные варианты, такие как роботы на колесах, могут застрять в виноградных лозах или нанести ущерб окружающей среде.
“Препятствия в реальном мире могут быть жесткими, как скала, или мягкими, как виноградная лоза, и мы хотим, чтобы у роботов были стратегии, предотвращающие спотыкание о них”, – сказал Джастин Йим, профессор инженерного дела в Университете Иллинойса Урбана-Шампейн и соавтор проекта.
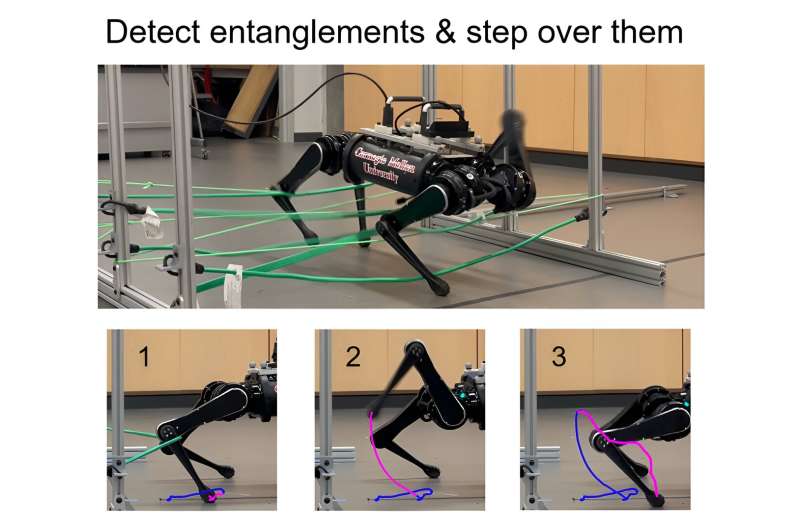
Исследование демонстрирует “основанный на импульсе наблюдатель для оценки крутящего момента проприоцептивного сустава, подходящий для классификации контактов на конечности робота как зацеплений”. То есть он следит за движением своих ног, чтобы увидеть, не застревают ли они на чем-то и не продвигаются ли вперед.
“Двуногие роботы могут выбирать точки опоры и перешагивать через предметы, а не просто проезжать через все подряд”, – сказал Ологан. “Проблема в том, что на каждом шагу вам приходится обдумывать свои точки опоры. Система невероятно деликатна. Если вы наткнетесь на ступеньку, весь ваш робот может упасть, поэтому нам нужны методы реагирования на внешний контакт”.
Автор: Университет Карнеги-Меллона, Инженерный колледж
Окружающая среда также влияет на эффективность и быстродействие роботов, объясняет Ологан.
“Интересно посмотреть на потенциал ножных роботов на открытом воздухе, в среде, основанной на растительности”, – сказал он. “Если вы живете в городе, колесная платформа, вероятно, является лучшим вариантом, потому что инфраструктура уже создана. Существует компромисс между способностью выполнять более сложные действия и эффективностью ваших движений”.
По словам Ологана, способность четвероногих роботов передвигаться по растительности может быть использована во многих областях и приложениях. Четвероногие в настоящее время используются для обследования нефтяных вышек, и улучшение их возможностей также может помочь в спасательных миссиях.
Команда протестировала несколько итераций модели ходьбы Чарли – робота. Они обнаружили, что реактивное втягивание ног роботом было лучшим вариантом для того, чтобы заставить его ориентироваться и выпутываться из препятствий. Другие методы, такие как высокий шаг и подход коленями вперед, были далеко не столь эффективны. Благодаря этому тестированию команда смогла заранее настроить простое реактивное движение ног, чтобы выпутаться из любых обнаруженных зацеплений. Эта технология, помогающая роботам распутывать себя, также может быть интегрирована в других роботов без необходимости модификации их существующего оборудования.